Documentation Revision Date: 2024-06-18
Dataset Version: 2
Summary
This dataset holds one data file in cloud optimized GeoTIFF format.
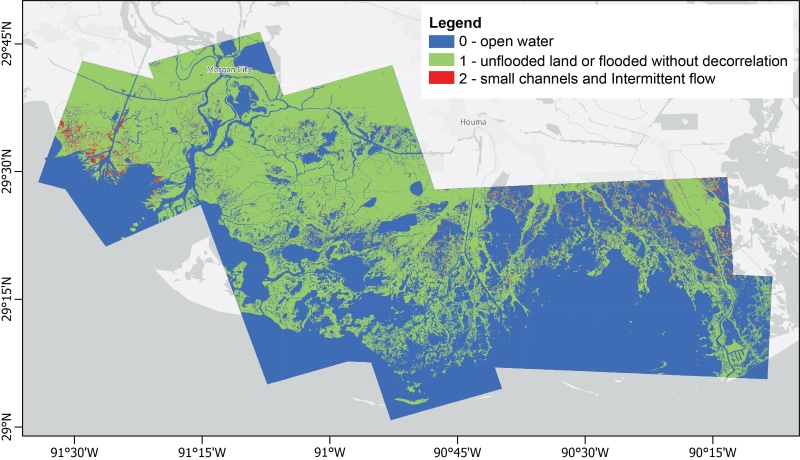
Figure 1. Water channels (blue) in the Atchafalaya and Terrebonne Basins of the Mississippi River Delta of coastal Louisiana, U.S., derived from UAVSAR coherence.
Citation
Jones, C., B. Varugu, T. Oliver-Cabrera, M. Simard, and Y. Lou. 2024. Delta-X: UAVSAR L3 Gridded Open Water Channels, MRD, LA, USA, 2021, V2. ORNL DAAC, Oak Ridge, Tennessee, USA. https://doi.org/10.3334/ORNLDAAC/2344
Table of Contents
- Dataset Overview
- Data Characteristics
- Application and Derivation
- Quality Assessment
- Data Acquisition, Materials, and Methods
- Data Access
- References
- Dataset Revisions
Dataset Overview
This dataset provides gridded estimates of water channels for the Atchafalaya and Terrebonne basins of the Mississippi River Delta in Louisiana, U.S.A. The data show channels with open water that are as narrow as 10 m. These channel estimates were generated from the Uninhabited Aerial Vehicle Synthetic Aperture Radar (UAVSAR) Level 1B interferometric products in radar coordinates acquired in the Spring and Fall Delta-X deployments of 2021, which have a spatial resolution of approximately 6 m. UAVSAR is a polarimetric L-band synthetic aperture radar (SAR) flown on the NASA Gulfstream-III aircraft. The channel estimates can be used to define open water paths in hydrodynamic models and to evaluate model performance.
Project: Delta-X
The Delta-X mission is a 5-year NASA Earth Venture Suborbital-3 mission to study the Mississippi River Delta in the United States, which is growing and sinking in different areas. River deltas and their wetlands are drowning as a result of sea level rise and reduced sediment inputs. The Delta-X mission will determine which parts will survive and continue to grow, and which parts will be lost. Delta-X begins with airborne and in situ data acquisition and carries through data analysis, model integration, and validation to predict the extent and spatial patterns of future deltaic land loss or gain.
Related Publications
Oliver-Cabrera, T., C.E. Jones, Z. Yunjun, and M. Simard. 2021. InSAR phase unwrapping error correction for rapid repeat measurements of water level change in wetlands. IEEE Transactions on Geoscience and Remote Sensing 60:1-15. https://doi.org/10.1109/TGRS.2021.3108751
Related Datasets
Jones, C., T. Oliver-Cabrera, B. Varugu, M. Simard, and Y. Lou. 2022. Delta-X: UAVSAR L3 Gridded Open Water Channels, MRD, Louisiana, USA, 2021. ORNL DAAC, Oak Ridge, Tennessee, USA. https://doi.org/10.3334/ORNLDAAC/2109
- Version 1 of this dataset.
Jones, C., M. Simard, Y. Lou, and T. Oliver. 2021a. Delta-X: UAVSAR L1 Products, Single Look Complex (SLC) Stack, MRD, Louisiana, 2021. ORNL DAAC, Oak Ridge, Tennessee, USA. https://doi.org/10.3334/ORNLDAAC/1984
- The UAVSAR products used to generate the L1B, L2, and L3 products.
Jones, C., T. Oliver-Cabrera, M. Simard, and Y. Lou. 2021b. Delta-X: UAVSAR L1B Interferometric Products, MRD, Louisiana, 2021. ORNL DAAC, Oak Ridge, Tennessee, USA. https://doi.org/10.3334/ORNLDAAC/1979
- L1B products used to generate these L3 water channel products.
Acknowledgement:
This program was funded under the NASA Earth Venture Suborbital-3 Program (NNH17ZDA001N-EVS3).
Data Characteristics
Spatial Coverage: Atchafalaya and Terrebonne Basins, southern coast of Louisiana, USA
Spatial Resolution: 0.00005556 degrees (approximately 6 m)
Temporal Coverage: 2021-04-01 to 2021-09-13
Temporal Resolution: one-time estimates
Site Boundaries: Latitude and longitude are given in decimal degrees.
| Site | Westernmost Longitude | Easternmost Longitude | Northernmost Latitude | Southernmost Latitude |
|---|---|---|---|---|
| Atchafalaya and Terrebonne Basins | -91.571 | -90.133 | 29.774 | 29.013 |
Data File Information
This dataset holds one data file in cloud optimized GeoTIFF format: DeltaX_Atchafalaya_Terrebonne_channels_vv.tif.
The field ‘vv’ accounts for different versions of the product, which can be related to spatial extent or time periods.
This L3 gridded channel product contains pixels with one of three values:
- 0 = open water (no vegetation above water surface)
- 1 = unflooded land or flooded land without significant interferometric decorrelation (if flooded, there is vegetation present above water surface)
- 2 = small channels and intermittent flow (includes flooded land with interferometric decorrelation to an extent)
- -9999 = no UAVSAR data acquired or missing data
GeoTIFF characteristics
- Coordinate system: geographic coordinates (longitude, latitude), WGS 84 datum, EPSG: 4326
- Spatial resolution: 0.00005556 degrees (~6 m)
- Extent: 25876 columns x 13682 rows
- Nodata value: -9999
- Data type: Int16
Application and Derivation
UAVSAR was used to measure hydrological parameters, and these UAVSAR Level 3 channel maps serve to define the open water paths in hydrodynamic models and to evaluate model performance.
Quality Assessment
Data quality of the channel map product was assessed through comparison with maps derived from optical imagery and with visual comparisons to Google Earth images. In all products, pixels that lack data or for which the data fail quality tests are marked as Nodata with value of -9999.
Data Acquisition, Materials, and Methods
UAVSAR is a polarimetric L-band synthetic aperture radar operating with 80 MHz bandwidth from 1217.5–1297.5 MHz designed for interferometry (InSAR) (Hensley et al., 2009). UAVSAR’s swath width is 22 km, which illuminates an area from ~22°–67° incidence angle, with 3 m (cross-track average) by 1 m (along-track) single look ground resolution. The instrument is flown on a Gulfstream-III (C20) aircraft, with the radar electronics and antenna housed in a pod mounted below the fuselage (Figure 2).
During the Delta-X campaign, the UAVSAR instrument was operated in its standard acquisition configuration, operating at an altitude of 12.5 km in quad-polarization mode, transmitting horizontally and vertically polarized radiation on alternate pulses and receiving both co-polarized (HH or VV) and cross-polarized (HV or VH) returns for each pulse.

Figure 2. (A) UAVSAR is flown on a Gulfstream-III aircraft, mounted in a pod hung below the fuselage. The antenna is left-side looking. The pod contains (B) the antenna and (C) the digital and RF electronics. The recording media are housed within the fuselage.
The radar instrument is designed to minimize the number of interfaces with the aircraft for improved portability. The aircraft provides 28 V DC power to the radar via the Power Distribution Unit (PDU), which is also responsible for maintaining the thermal environment in the pod. The instrument uses both an embedded GPS inertial navigation unit (EGI) and a differential GPS (DGPS) unit to derive the antenna position, attitude and velocity in real-time. Waypoints for the desired flight paths are generated prior to flight by the Flight Planning Subsystem and loaded into the platform’s Precision Autopilot system and the radar’s Automatic Radar Controller (ARC) along with radar command information for each waypoint. The ARC is designed to operate in a fully autonomous mode or to accept commands from the Radar Operator Workstation (ROW) through an ethernet connection. The active array antenna consists of 24 L-band Transmit/Receive modules that feed 48 radiating elements within the 0.5 m by 1.5 m array. Robust differential interferometric measurement imposes two observational constraints on the UAVSAR radar and platform, namely, flight track repeatability and antenna steering capability. The UAVSAR G-III aircraft contains a Platform Precision Autopilot (PPA) system (Lin et al., 2008) to control the aircraft position through the aircraft’s instrument landing system based upon high precision real-time position information provided by a DGPS unit that is part of the radar instrument. The aircraft normally flies within 5 meters of the planned flight track. The antenna is electronically steered to compensate for variations in the yaw and pitch angles of the aircraft, which arise from varying and different wind conditions aloft both within a single acquisition and on repeated tracks. The steering adjustments are designed to maintain a constant look direction and the adjustments are based on real-time attitude angle measurements derived from the EGI.
A minimum of two operators fly onboard the aircraft, one the radar operator and the other the PPA operator. The system contains automated on-board track monitoring software that evaluates flight performance during science data collection based on predefined track quality criteria and notifies the operators when the aircraft deviates from the planned track outside the bounds of accepted tolerances. The operator can then request that the flight line be aborted and reacquired. The decision to re-fly lines is made with consideration to line priority, aircraft fuel levels, and crew day limitations. During Delta-X flights, the UAVSAR flight crew included a mission scientist from the Delta-X team to make decisions about line priority and reacquiring lines in cases where a flight line was aborted.
Water Channel Gridded Estimates
The geocoded L3 gridded channel estimates were generated to cover the combined area imaged by UAVSAR. The process started with UAVSAR Level 1B Interferometric products (Jones et al., 2022a) from both spring and fall campaigns. Data from the multiple flight lines are merged to produce one map covering the Atchafalaya and Terrebonne basins (Figures 1 and 3).
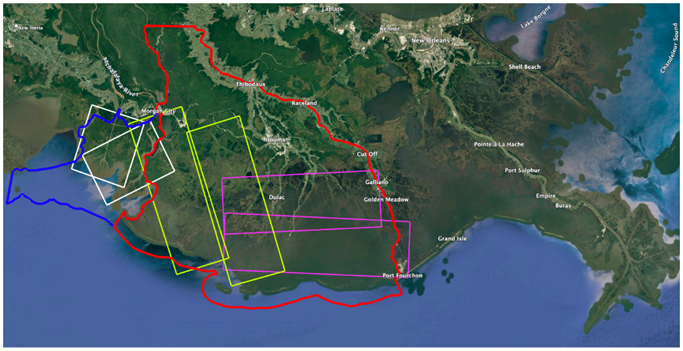
Figure 3. The Atchafalaya (blue) and Terrebonne (red) basin outlines and the coverage of the UAVSAR flight lines used to generate the channel estimates. Repeated acquisitions of two lines were made on each flight, one plan covering the Atchafalaya area (white), the second covering West Terrebonne (green), and the third covering East Terrebonne (purple).
Data from both spring and fall were used because the spring campaign had many inundated areas that obscured the channel network and because in both spring and fall some of the lines had low coherence over parts of the scene, probably due to heavy cloud cover. In general, to obtain the best channel extent without including a lot of seasonally flooded areas, data from higher tide acquisitions in fall (Figure 5) were used to make the map. In some cases, channels in parts of the scene were taken from data acquired in other flights for the reasons mentioned above. One spring data set was used to improve channel definition in the interior of the Atchafalaya basin (atchaf_06309) .
The final channel map was constructed from individual channel maps made for each flight line. The individual channel maps were made using the interferometric coherence (L1 coh.dat files) for all acquisitions during the flight. For example, on 2021-09-12, the wterre_34202 line was acquired 8 times, at times {T1,...,T8} with ~25-30 minute intervals between acquisitions. The water pixels were selected based on the average interferometric coherence of the nearest neighbor (NN) interferometric pairs made with all the acquisitions on a flight day by applying a maximum average coherence threshold of 0.50. This threshold was selected to identify areas with open water during the entire flight, not flooded emergent vegetation, although some pixels with low coherence could represent disturbance from other sources, such as human activity at the Delta-X ground sites. Some areas flooded with emergent vegetation can have high coherence in the NN interferograms, but loose coherence in the greater temporal baseline interferograms such as NN+1 and NN+2 formed with acquisitions taken at ~50-60 min and ~75-90 min intervals. Such pixels were marked with ‘2’ in the map and contain useful information on small water channels and overbank flow that occurred during the imaging time period. The final map was produced by merging the individual maps for each flight line and in the overlap areas. Lines with less noise were chosen based on visual comparison to optical images. Due to noise from low coherence and lack of datasets from the fall season, the map produced for the atchaf_06309 line had only open water (0) and land (1) categories; however, much of its coverage area was filled using data from overlapping flight lines.
After merging the individual images, the final gridded estimates were geocoded using the lat/lon/height (.llh) files from the single look complex (SLC) dataset (Jones et al., 2022a) and produced in GeoTIFF format using GDAL-based code.
Table 1: Summary of flight lines, dates, and number of acquisitions for the data used to make the channel maps.
| UAVSAR flight line | Date | Number of acquisitions |
| atchaf_06309 | 2021-04-01 | 7 |
| atchaf_19809 | 2021-09-13 | 4 |
| eterre_08705 | 2021-09-07 | 8 |
| eterre_27309 | 2021-09-07 | 7 |
| wterre_16300 | 2021-09-12 | 7 |
| wterre_34202 | 2021-09-12 | 8 |
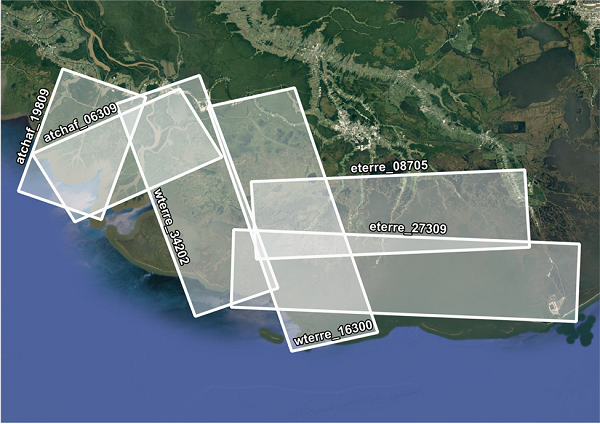
Figure 4. Spatial coverage of each UAVSAR flight line acquired during the 2021 Delta-X campaign. Shown are the Atchafalaya and Terrebonne Basins along the southern coast of Louisiana, USA.
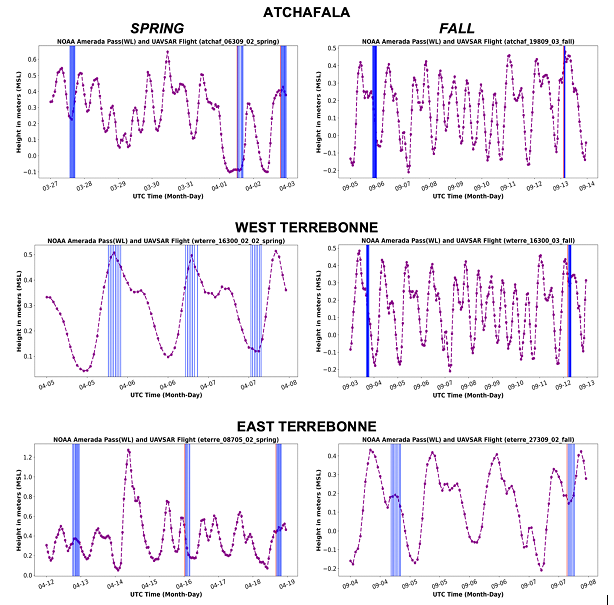
Figure 5. Water levels measured at the NOAA Amerada Pass gauge in the Atchafalaya Delta during each flight of the spring (left) and fall (right) Delta-X campaigns.
Data Access
These data are available through the Oak Ridge National Laboratory (ORNL) Distributed Active Archive Center (DAAC).
Delta-X: UAVSAR L3 Gridded Open Water Channels, MRD, LA, USA, 2021, V2
Contact for Data Center Access Information:
- E-mail: uso@daac.ornl.gov
- Telephone: +1 (865) 241-3952
References
Hensley, S., H. Zebker, C. Jones, T. Michel, R. Muellerschoen, and B. Chapman. 2009. First deformation results using the NASA/JPL UAVSAR instrument. 2009 2nd Asian-Pacific Conference on Synthetic Aperture Radar. https://doi.org/10.1109/APSAR.2009.5374246
Jones, C., T. Oliver-Cabrera, B. Varugu, M. Simard, and Y. Lou. 2022. Delta-X: UAVSAR L3 Gridded Open Water Channels, MRD, Louisiana, USA, 2021. ORNL DAAC, Oak Ridge, Tennessee, USA. https://doi.org/10.3334/ORNLDAAC/2109
Jones, C., T. Oliver-Cabrera, M. Simard, and Y. Lou. 2021a. Delta-X: UAVSAR L1B Interferometric Products, MRD, Louisiana, 2021. ORNL DAAC, Oak Ridge, Tennessee, USA. https://doi.org/10.3334/ORNLDAAC/1979
Jones, C., M. Simard, Y. Lou, and T. Oliver-Cabrera. 2021b. Delta-X: UAVSAR L1 Single Look Complex (SLC) Stack Products, MRD, Louisiana, 2021. ORNL DAAC, Oak Ridge, Tennessee, USA. https://doi.org/10.3334/ORNLDAAC/1984
Lin, V., B. Strovers, J. Lee, and R. Beck. 2008. Platform precision autopilot overview and flight test results. AIAA Guidance, Navigation, and Control Conference and Exhibit; Honolulu, Hawaii. https://ntrs.nasa.gov/api/citations/20080033977/downloads/20080033977.pdf, https://doi.org/10.2514/6.2008-6461
Oliver-Cabrera, T., C.E. Jones, Z. Yunjun, and M. Simard. 2021. InSAR phase unwrapping error correction for rapid repeat measurements of water level change in wetlands. IEEE Transactions on Geoscience and Remote Sensing 60:1-15. https://doi.org/10.1109/TGRS.2021.3108751
Dataset Revisions
|
Version |
Release Date |
Revision Notes |
|
2 |
2024-06-18 |
Version 2 of this dataset. A single GeoTIFF file was provided covering both the Atchafalaya and Terrebonne basins. This version preferably used UAVSAR acquisitions on high tide day during the fall season as inputs and introduced small channels and intermittent flow (pixel value = 2). |
|
1 |
2022-09-15 |
Version 1 of this dataset; Two GeoTIFF files were provided for each of the Atchafalaya and Terrebonne basins. |